- Robot porusza się po zaczernionym
torze o dowolnym kształcie
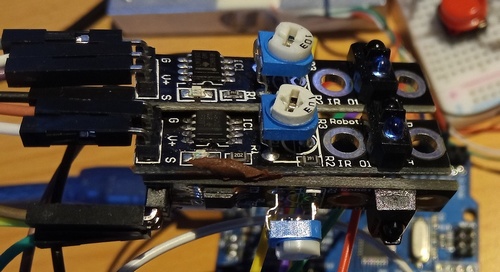
- Na torze robota utrzymują czujniki trakcji regulujące pracę silników
- Robot może poruszać się po zamknietej petli lub dojeżdżać do punktu
zwanego przystankiem
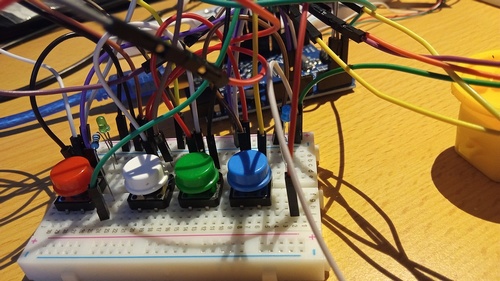
- Numer przystanku jest wybierany przyciskiem od 1 do 3
- Po dotarciu robota do przystanku zatrzymuje się na określony czas
- Po zatrzymaniu cofa się do punktu początkowego
- Robot kończy biego po zjechaniu z zaczernionego toru
Przykłady
działania.
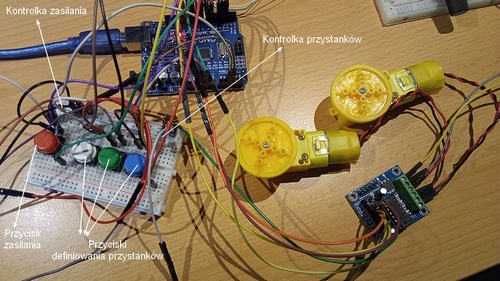
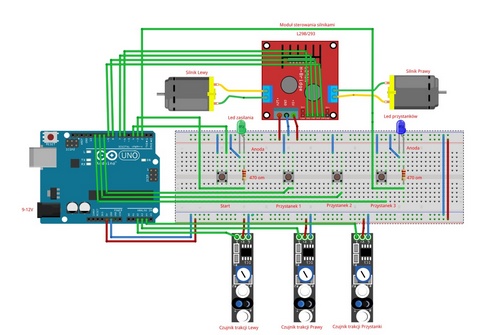
Układ na płytce prototypowej: Definiowanie
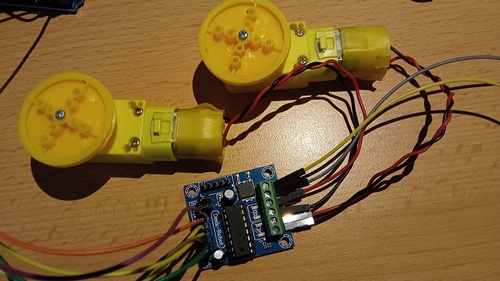
przystanków: Układ napędowy: Czujniki trakcji:
Film 1- test układu
napędowego:
Film 2 - test
czujników trakcji:
Film 3 - test sterowania silnikami:
Schemat:
Strona
korzysta z plików cookie w celu realizacji usług zgodnie z
Polityką prywatności. Możesz określić warunki przechowywania lub
dostępu do cookie w Twojej przeglądarce lub konfiguracji usługi.